Project news
Project news

Empowering robotic sight with accurate 6D pose estimation for flexible manipulation
One of the main challenges in robotics is the precise estimation of the position and orientation of objects located in a three-dimensional space. This [...]

HARTU’s FBG sensors: enhancing robotic grasping precision
Stable robotic grasping requires continuous contact force monitoring to prevent slippage or damage during tasks like pick-and-place. Variations in grasp points, object dynamics, and [...]
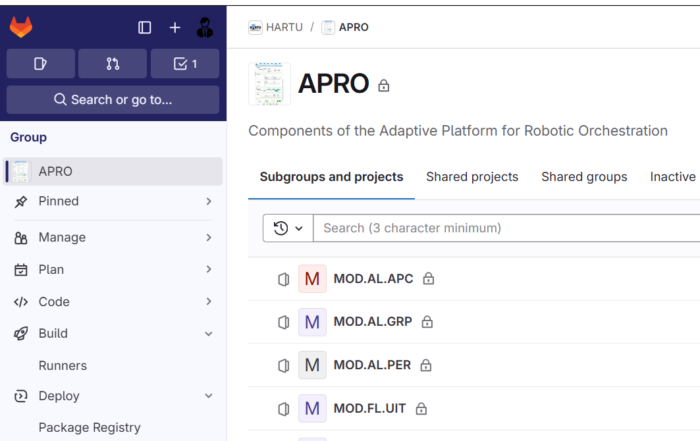
Enhancing robotics development with DevOps: the HARTU approach
The HARTU project integrates modern DevOps practices to improve software development efficiency, reliability, and scalability in robotics and AI-driven manufacturing. By combining Continuous Integration/Continuous [...]
The future of Human-AI-Teaming collaboration
The rapid advancement of Artificial Intelligence (AI) and robotics is reshaping how humans interact with machines. In modern industries, AI-powered systems and robots are [...]

Joint webinar: exploring the human role in manufacturing automation
Join us on February 19th at 14:30 CET for the second HARTU online webinar. This special event is organised in collaboration with our sister [...]

HARTU’s 4th General Assembly: a productive in-person meeting
Last week, the HARTU consortium gathered for the 4th General Assembly, hosted by our partner PCL in Drachten, Netherlands. It was a pleasure to [...]
